Project 2 Flag Pole
The goal of project 2 "Flag Pole" was to design and create a straight bar linkage system that moves a character along a vertical line of at least 10 cm. The requirements stated that there should be 3 or more moving links, and that power should be generated through motors. This project involved CAD with the online platform OnShape, python code for controlling system, and laser cutting manufacturing.
The Process
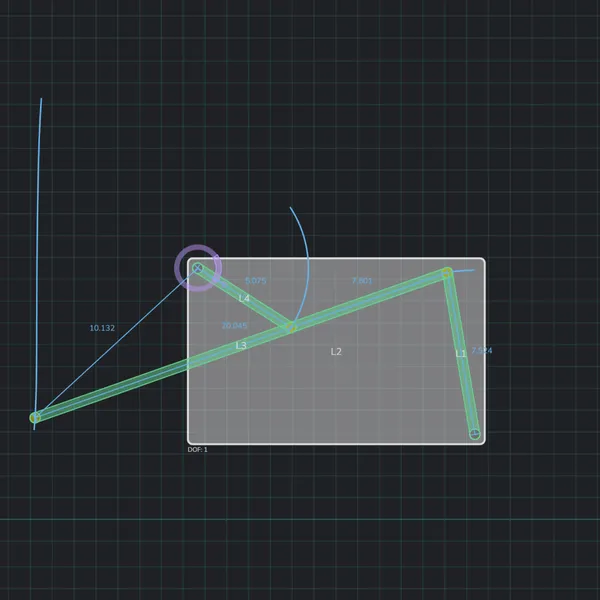
I started off this project by tinkering with MotionGen.io, a simulation tool shown in class, while conducting research online on for suitable mechanisms. Through my search, I found the grasshopper straight line mechanism and continued to implement it into the MotionGen. This design worked well, was simple, and fit the requirements. Given this I then took the dimensions and started to design the assembly in CAD.
The CAD portion of this project was pretty straight forward, the lengths of the links were given by the MotionGen software, and the widths were constrained by the size of the bearings. The only challenge was thinking of how the linkages would connect together. I decided to tackle that with during the manufacturing of the mechanism.
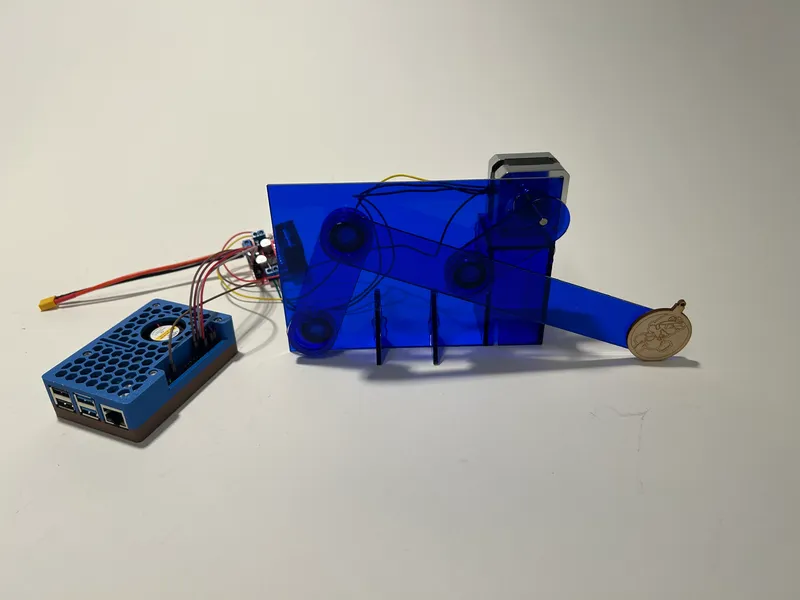
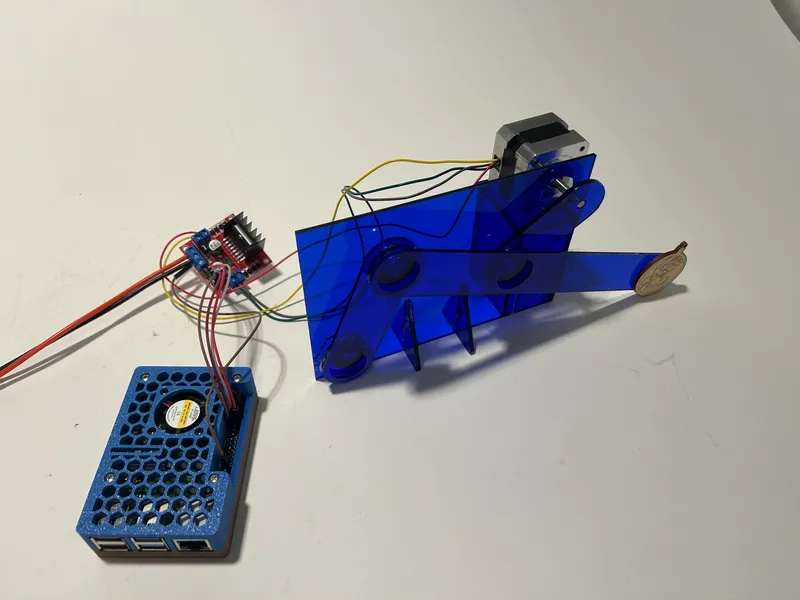
During the assembly portion, I had chosen to use single bearings for each connection and connect one link to either the inside or outside of the bearing. To achieve this I used hot glue. Although this is not a robust solution, it worked for my purposes.

Results
The success criteria of this project was that the character move more than 10cm, in a vertical line. In demonstration of my system, I was successful in this requirement.