
Satellite Star Surveyor
An autonomous space telescope simulation that combines star target planning, attitude guidance, nonlinear state estimation, MPC control, closed-loop dynamics, and 3D mission visualization.
Modeling & SimulationNonlinear ControlKalman FilterPython

Learning-Augmented MPC for Spacecraft Attitude Control
A controller comparison study for nonlinear spacecraft attitude regulation under model uncertainty, actuator limits, and persistent disturbances.
Modeling & SimulationNonlinear ControlML Augmented ControlPythonPyTorch
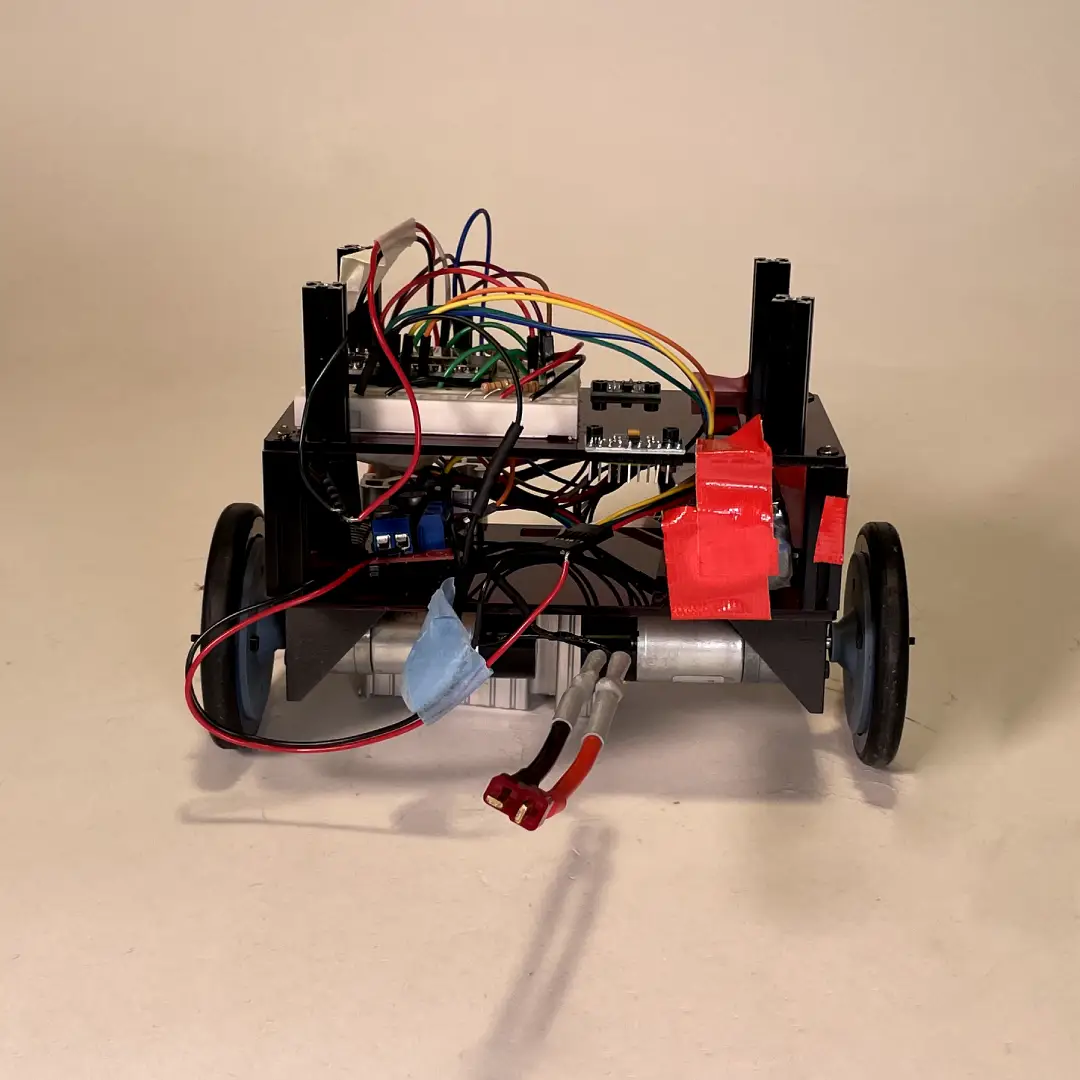
Self-Balancing Robot
I designed and created a self-balancing robot that not only stabilizes itself but also holds position using a cascaded PID architecture on an ESP32, real-time sensing (IMU + encoders), and Wi-Fi/MQTT for live tuning.
ControlHardwareEmbedded Software (C++)

4DOF Kinematic Robotic Arm
Developed a 4DOF robotic arm capable of drawing shapes and characters on a plane, incorporating inverse/forward kinematics, modular CAD design, and servo actuation.
Inverse KinematicsCAD ModelingEmbedded Software (C++)Hardware