Project 6 Mushroom Kingdom Raceway
An AI-driven iRobot Create 3 that navigates a raceway using image recognition and ROS 2.
The goal of Project 6: "Mushroom Kingdom Raceway" was to be able to get an iRobot create 3 to traverse a path though the use of AI image recognition. The path was comprised of straight lines, connected by 90 degree corners, which were designated by unique objects. To successfully complete this project the robot should be able to continue straight, until detecting an object, recognize it, then turn a specified angle based on what it is. This Project involved working with ROS 2 (Robot Operating System), and the implementation of AI.
The Process
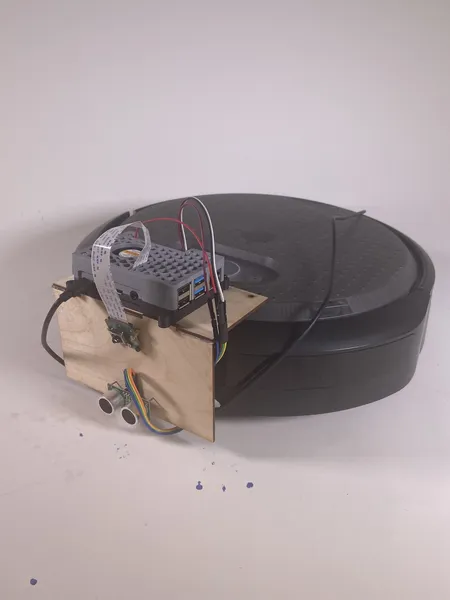
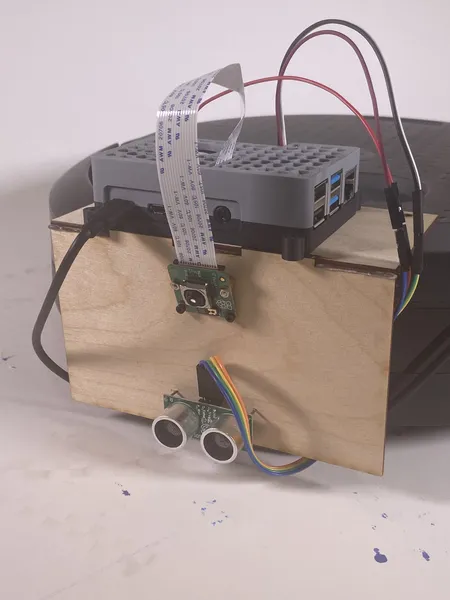
This project was kicked off with starting the design of the layout and configuration of our robot. As a group, we knew that we needed to mount a camera for object recognition, and some sort of distance sensor. We decided on using an ultrasonic distance sensor for this case. Next we created a basic holding bracket that fitted onto the front of the create 3 robot. With all the components mounted, the next part was to move to software.
In order to integrate AI image recognition into our program, we first needed a model. To do this we utilized "Teachable Machines", by google, to train an AI on a organized set of labeled images. The end result being a model that could differentiate each of the seven objects from one another. Using Keras, we implemented the model into our pervious project's code, project 5, with the addition of adding camera and ultrasonic distance handling. This was possible because the core requirements of both projects were the same. Our robot was set up to move forward until it detected an object 6 inches ahead, which then it would snap a photo, classify it, and turn in a given direction given a look up table. This table provided through an API called "AirTable" where we could modify turning directions on demo day, in response to seeing the course.
Results
Our project proved to be successful, as our robot was able to complete the course, with minimal intervention.