Project 3: Star Road
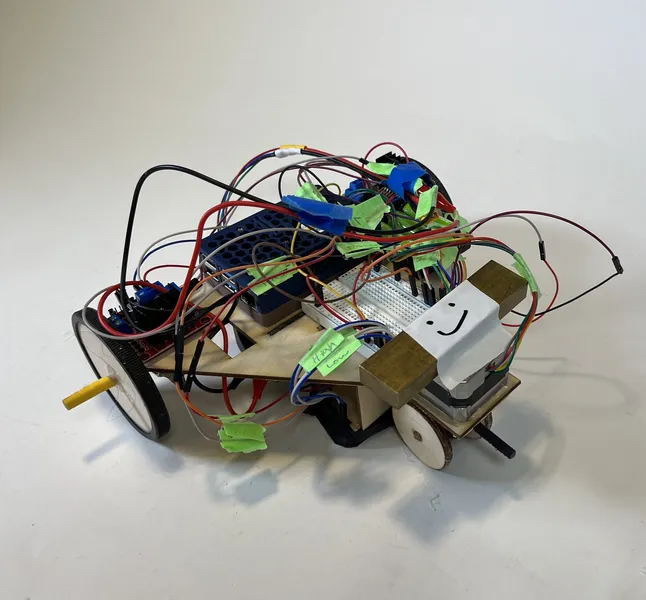
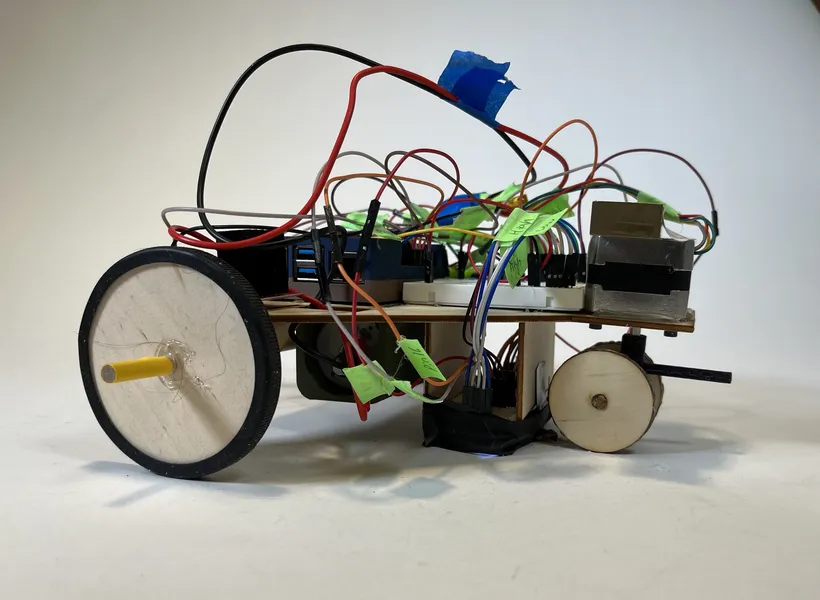
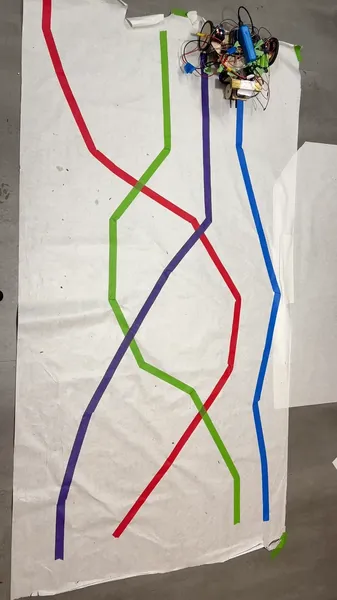
The goal of project 3 "Star Road" was to design and create a line following robot, with the challenge of only utilizing color sensors. This task proved to be the most difficult yet and required great time investment. This project included 3D CAD software, 3D printing and laser cutting manufacturing, and the development of control algorithms.
The Process:
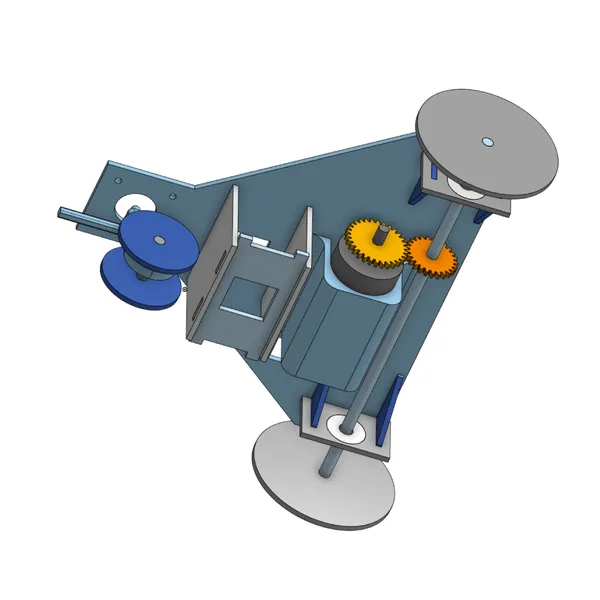
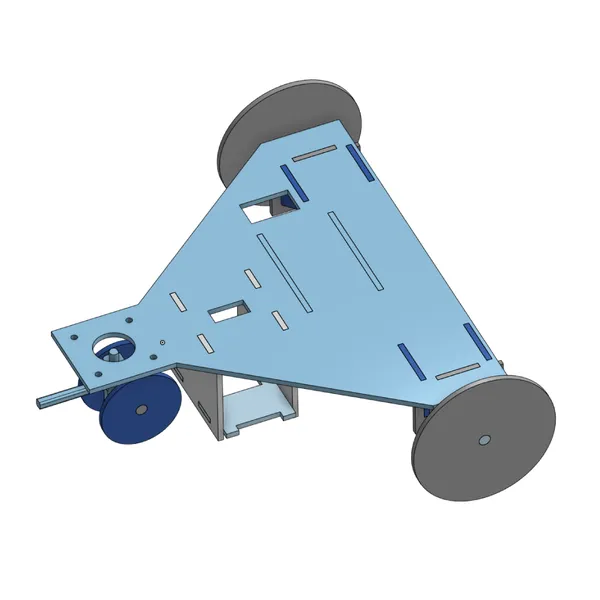
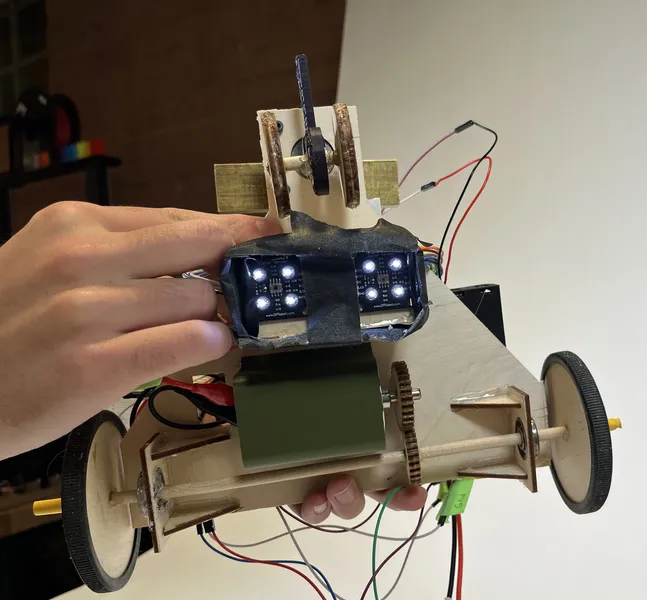
To kick off this project my partner and I, settled on the form of locomotion used by the robot: 1 rear motor driving torque to 2 wheels, and a front stepper motor for steering. Next was to create a CAD design. This was the most fun part of the project by far. With the power of CAD, new designs can easily be made and tested for spacial compatibility. The design of this robot is my best CAD work thus far.
Manufacturing this robot was relatively easily and same for wiring the electronics, as these are skills I have already developed over the course of previous work. Although, creating the control algorithm would prove the most challenging task yet. Initially we tried a PID control algorithm, though this proved almost impossible as the sensors were very unreliable. Then we tried a threshold control where we would go left or right of the line till we hit a certain threshold value, then turn back. With this we would almost always loose the line. This continued with other algorithms where we measured the derivative of the color value, and averaged our 2 sensors into 1 sensor. All of these attempts were futile. My partner later created a better light enclosure for the color sensors, and this caused the threshold algorithm to work. This was because light leak was causing, excessive random noise, leading to unreliable data.
Results:
The success criteria of this project was for the robot to be able to follow a line from start to finish. Although we followed the blue line, which was the easiest line, we were successful in this requirement.