Project 1: Double Jump

The goal of project 1 "Double jump" was to design and create a gear train to reduce a 360-degree rotation, generated from a stepper motor to a 90-degree change, there in by making the Mario character "jump". Additionally, requirements stated that there should be 4 or more gears, and that no gear generators were allowed. This project involved CAD with the online platform OnShape, python code for controlling system, and laser cutting manufacturing.
The Process:
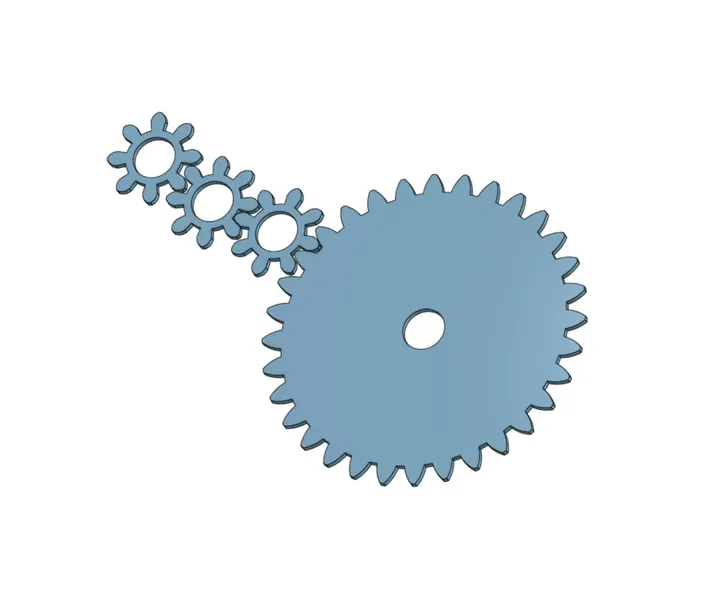
To begin with I recognized that a total gear reduction of 4:1 was necessary to convert the 360-degree movement to 90 degrees. Furthermore, it would make the most sense to maximize the size of the last gear, so that the distance traveled by the character is maximized. For these reasons I only needed to design 2 different gears: the smaller, which would be created 3 times, and the larger one.
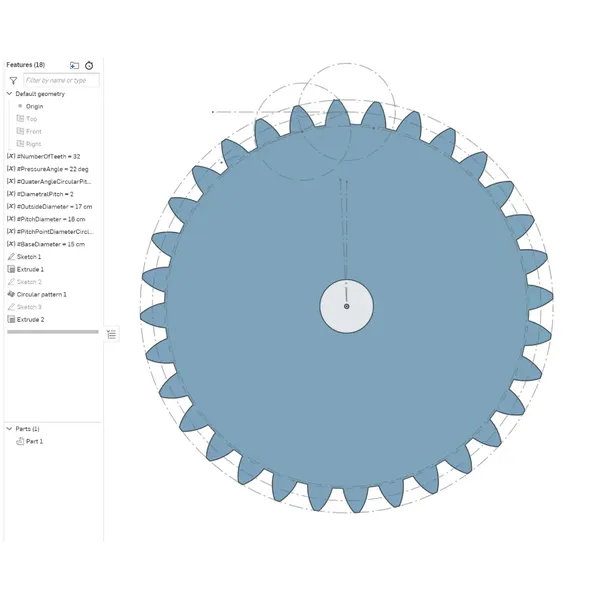
Next was designing the gears. With online resources, I was able to design a gear that could be customized, through a set of variables I setup in OnShape. With this I was able to create the two necessary gears.
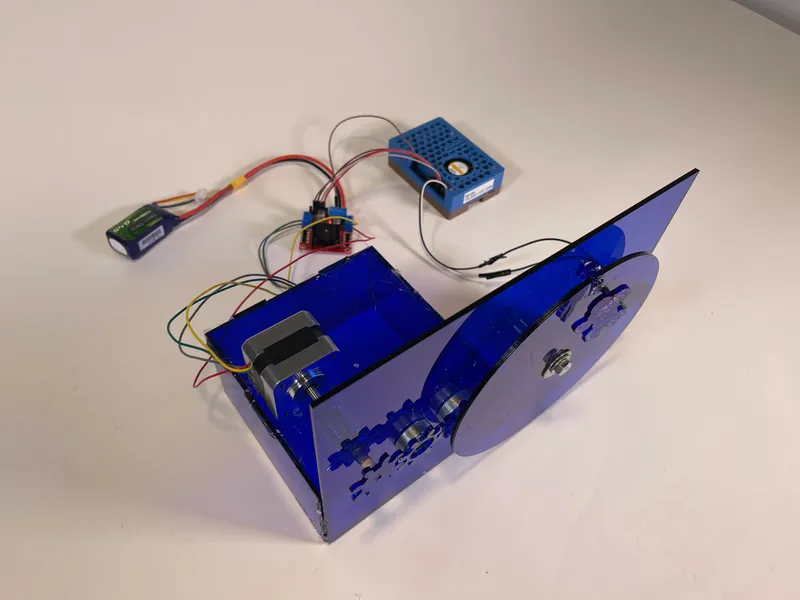
The last major hurdle was to setup the electronics for the system. As I was using a stepper motor, I needed to use a motor driver, which was controlled by a Raspberry Pi. Given the uniqueness of how stepper motors operate, controlling them requires a series of special inputs, which is where the python code on the Raspberry Pi comes to play. The code cycles the stepper motor for 200 steps or 1 full revolution, which is reduced to the 90-degree goal.
As one last feature of the system, I was able to implement a limit switch, which would automatically calibrate the starting point of the system. This is so that if the system was started in any arbitrary orientation, the requirements would still be achieved.
Results:
The success criteria of this project was that Success = +/- 50 degrees, and Super Success = +/- 5 degrees. In demonstration of my system, I was able to land on the 90 degree target, with a deviation of 0 degrees, constituting a "super success".