Robot Arm


In this project I designed a 4 Degree of Freedom robot capable of drawing any set of shapes of characters on a plane, using a drawing instrument. This Project involved inverse/forward kinematics, 3D CAD, and embedded software engineering.
Mechanical Design:
The Mechanical structure of the robot arm was made loosely based off of a project I saw online, a 4DOF surgical robot. My design incorporates a modular design with repeated elements to decrease possible design problems.
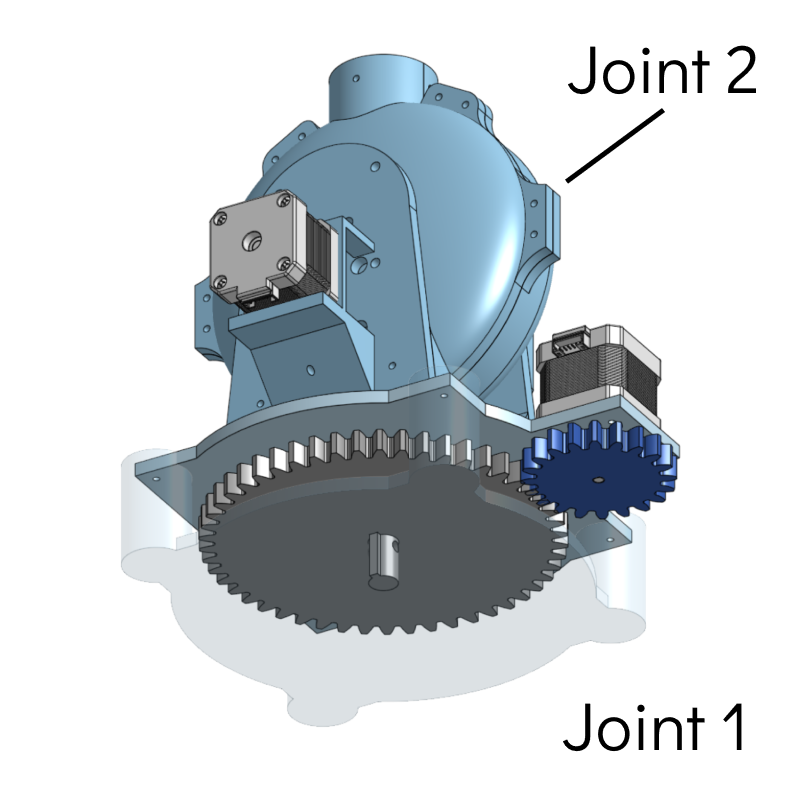
Joint 1 rotates the base and is composed of a simple gear system with a gear ratio of 2:5 which is acceptable, as it is not load bearing.
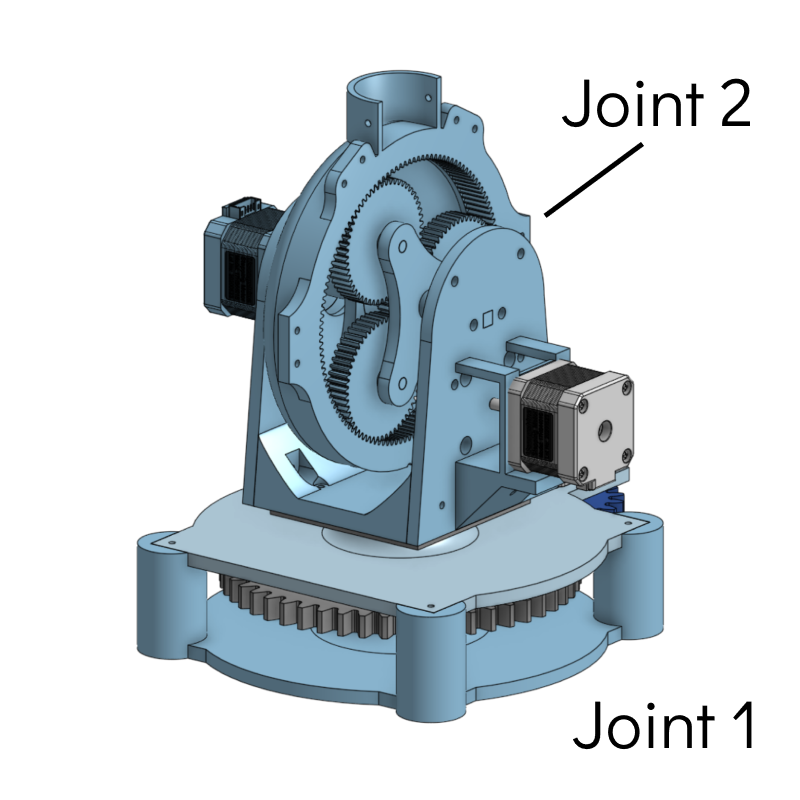
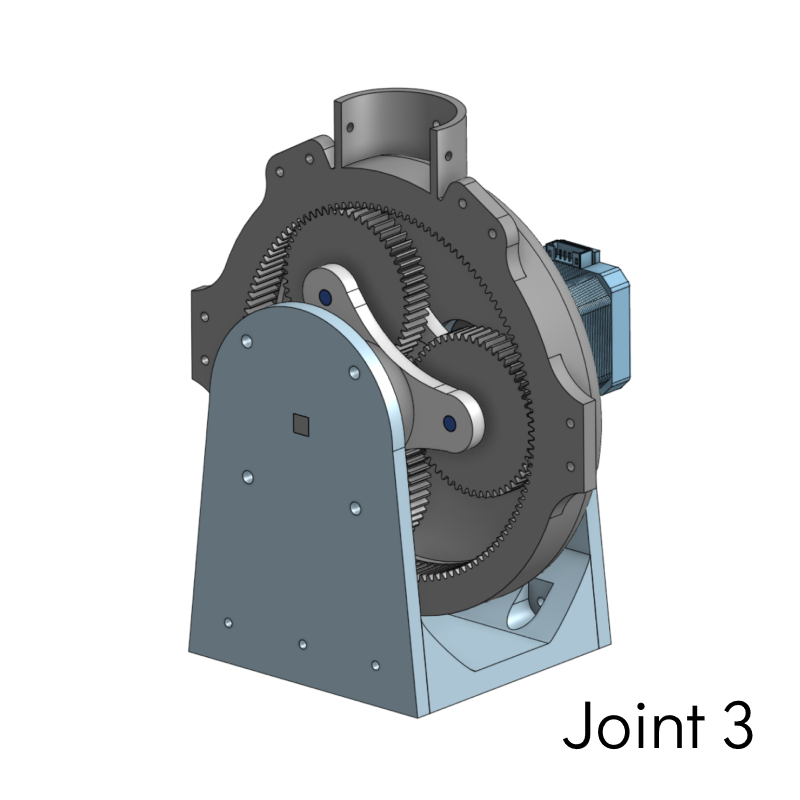
Joint 2 and 3 use a planetary gear system with a 8:1 gear ratio. These joints are load bearing and must provide enough torque to at least support the weight of the links.
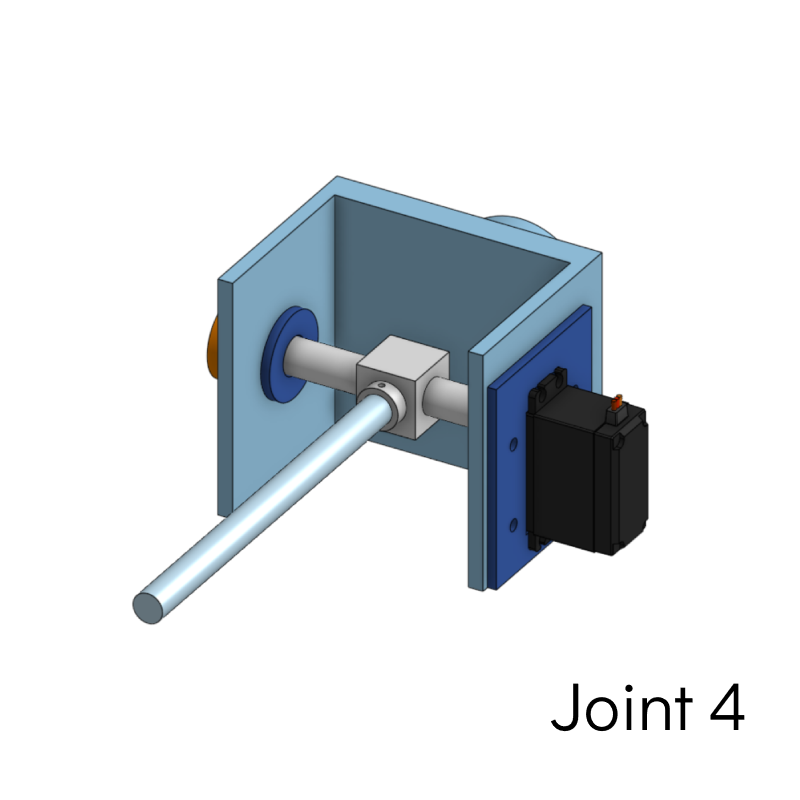
Joint 4 was built with a servo. This was done as the joint only requires a low amount of torque to actuate. The servo offers higher resolution and significant weight reduction.
Future Developments:
At present I don't have a working prototype, although I plan on spending this winter break to fix that.